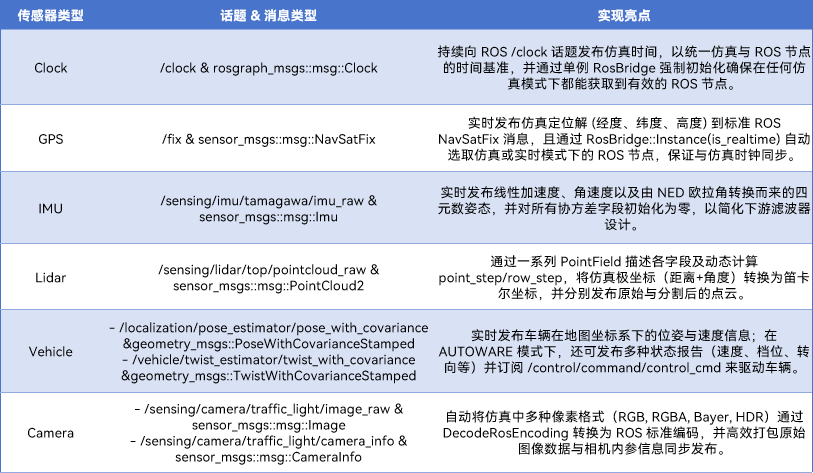
在自动驾驶与机器人仿真领域,传感器数据的高效交互是连接虚拟仿真与实际系统的关键纽带。ROS(Robot Operating System) 作为行业通用的机器人操作系统,其传感器数据交互机制直接影响仿真的真实性与系统集成的便捷性。 本文基于对aiSim 中各类 ROS 传感器(时钟、GPS、IMU、激光雷达、车辆、相机)模块的源码学习,梳理了它们的共性架构...
讲AI的李想,身后是一条裂谷?
FREELANDER神行者8 首发限定版全球首秀
央企巨头携手独角兽,千亿Robovan市场剧变
高端纯电的路,蔚来走通了
「愧疚」已经挡不住李斌和乐道冲量的心了
 环贸财神
2025-10-26
环贸财神
2025-10-26